Ciao a tutti!
Oggi voglio raccontarvi la mia esperienza di rilievo in una zona edificata (quasi centro città), dove ho dovuto utilizzare alcune tecniche di rilievo “tradizionali”, a supporto del rilievo GNSS.
Il lavoro consisteva nel rilievo di un lotto di terreno, al fine di predisporre un aggiornamento catastale, appoggiandolo ai punti fiduciali catastali quali vertici di coordinate note per l’inserimento cartografico.
Non è un lavoro “difficile” e non richiede una precisione spinta; le tolleranze relative alle misure di distanza tra due punti fiduciali sono dell’ordine di decine di centimetri, quindi un rilievo GNSS, in configurazione NRTK (con una soluzione delle coordinate del punto rilevato in tempo reale mediante l’utilizzo, generalmente, di un servizio di correzione di rete veicolato attraverso internet), è ampiamento sufficiente allo scopo.
Durante il rilievo capita, anche spesso, di dover rilevare la posizione di punti non facilmente accessibili, quali ad esempio, i punti fiduciali, che a volte sono istituiti posizionandoli su spigoli di fabbricati recintati e di proprietà privata nella quale per qualche motivo non possiamo entrare.
Se stai facendo un rilievo con il gps, inoltre, non è detto che tu possa avvicinarti più di tanto allo spigolo di un fabbricato, dato che per sua natura il gps ha bisogno di una bella porzione di cielo visibile (non coperto) per ricevere i segnali dai satelliti in orbita, in modo da poter risolvere la sua posizione centimetricamente, ed essere vicini a un fabbricato che copre una parte di cielo non aiuta!
Tutto questo si traduce nella necessità di utilizzare degli artifici per poter rilevare la posizione del punto non accessibile mediante un rilievo GNSS.
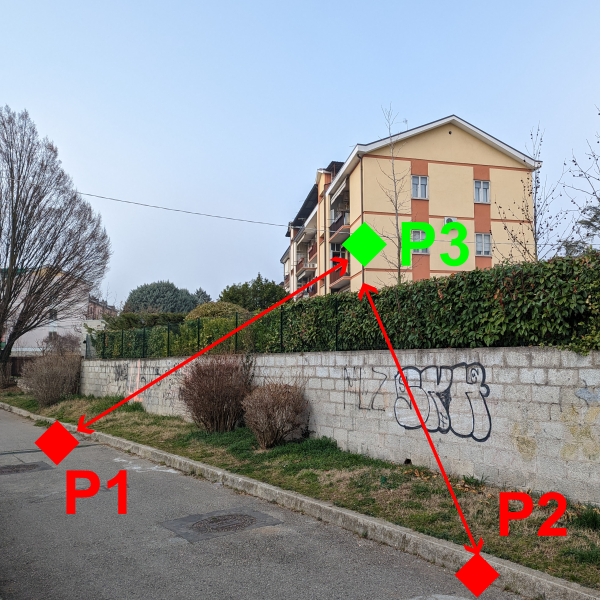
Generalmente si fa così: si rilevano le coordinare di due punti (P1 e P2) con il gps, e si misurano anche le distanze orizzontali tra i punti P1 e P2 e il punto inaccessibile (che chiamerò P3). In questo modo sono noti i 3 lati del triangolo costituito da P1, P2 e P3 e quindi si possono risolvere le coordinate del punto inaccessibile.
Non entro nel merito delle formule trigonometriche per calcolare le coordinate, sarebbe lungo e di solito i software di controllo dei GPS installati negli strumenti di controllo (tablet, palmari e simili) integrano queste funzioni sotto il nome di “punti COGO”, che risolvono il calcolo e memorizzano direttamente le coordinate del punto (P3).
E qui si utilizza, di solito, un distanziometro laser, tipo questo qui:

il modello mi piace anche perchè ha il laser verde e ovviamente il “Pitagora”
Non sempre è possibile tenere il distanziometro orizzontale, per la misura diretta della distanza orizzontale.
Nell’immagine più sopra ho indicato i punti P1, P2 e P3, si può vedere come mura e siepe non permettono di tenere il distanziometro orizzontale e pertanto la misura lineare presa all’altezza, diciamo del secondo piano, va ridotta all’orizzonte utilizzando una tecnica semplice e basilare.
In questi casi ci viene in aiuto il Teorema di Pitagora.
Pitagora dentro un distanziometro!
Il teorema di Pitagora è una formula matematica che stabilisce la relazione tra i lati di un triangolo rettangolo. Nella misurazione con i distanziometri laser (almeno quelli con un inclinometro interno), il teorema di Pitagora viene utilizzato per calcolare la distanza orizzontale tra il punto da rilevare e il punto di appoggio del distanziometro. In particolare, il distanziometro laser misura la distanza in linea retta tra il punto da rilevare e il punto di appoggio, che è quindi inclinata rispetto all’orizzonte. Utilizzando il teorema di Pitagora, il software interno al distanziometro, restituisce il valore della distanza orizzontale e del dislivello dal punto rilevato all’orizzonte, in sostanza i cateti del triangolo rettangolo.
Piccola parentesi “teorica”: credo che la funzione contenuta all’interno del distanziometro faccia prima il calcolo del dislivello sulla base dell’angolo rilevato dall’inclinometro interno, e poi risolva il “Pitagora” del triangolo rettangolo.
Spessissimo nei distanziometri è integrata questa funzione, se il tuo non ce l’ha e ti serve questa funzione, beh… meglio che cambi distanziometro!
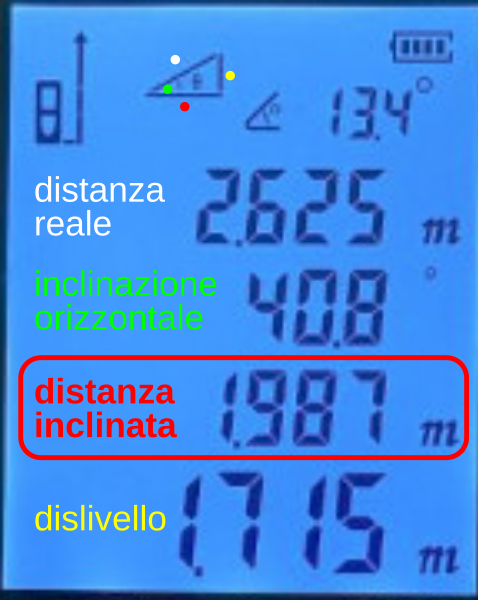
la distanza che ci serve è quella reale
due triangoli risolti e ancora una domanda!
Risolti i triangoli originati nei punti P1 e P2 e ottenute le distanze orizzontali tra P1, P2 e il punto inaccessibile P3, si memorizza la coordinata del punto P3 e si procede con il resto del rilievo.
una parentesi anche qui: la soluzione dei due triangoli da sola non basta, bisogna anche “scegliere” una delle due soluzioni della trilaterazione (da che lato è il punto P3? a destra o a sinistra). Un bell’articolo del blog di Gianni Rossi ne parla approfonditamente.
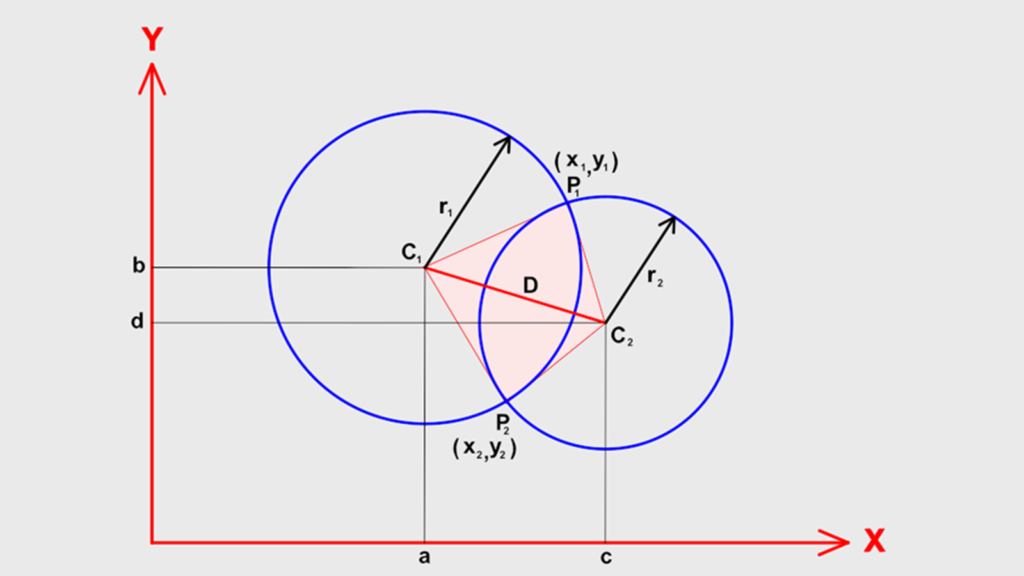
Dal punto di vista prettamente operativo la soluzione è semplice e evidente, ma dal punto di vista matematico non è così banale! Nell’articolo che ho linkato Gianni Rossi ne parla approfonditamente!
si però…
dal punto di vista operativo e pratico, in campo, ci sono un paio di fattori delicati e che potrebbero compromettere la bontà, sempre nei limiti di accuratezza di cui ti ho accennato all’inizio, dei dati così acquisiti.
In sostanza non è per nulla banale, nella pratica, tenere fermo un distaziometro appoggiato al fianco della palina che sostiene il ricevitore GNSS, e contemporaneamente tenere la palina in bolla sul punto rilevato (nel mio esempio P1 o P2) e di nuovo contemporaneamente puntare il puntino laser sulla superficie che ci serve da riferimento!
Io uso, per questo motivo, un paio di accessori per la palina che ritengo fondamentali.
Il primo è il bipode. in sostanza è un accessorio che aggiunge un paio di gambe alla palina per permetterle di stare in bolla da sola senza che tu abbia la necessità di tenerla con le mani.

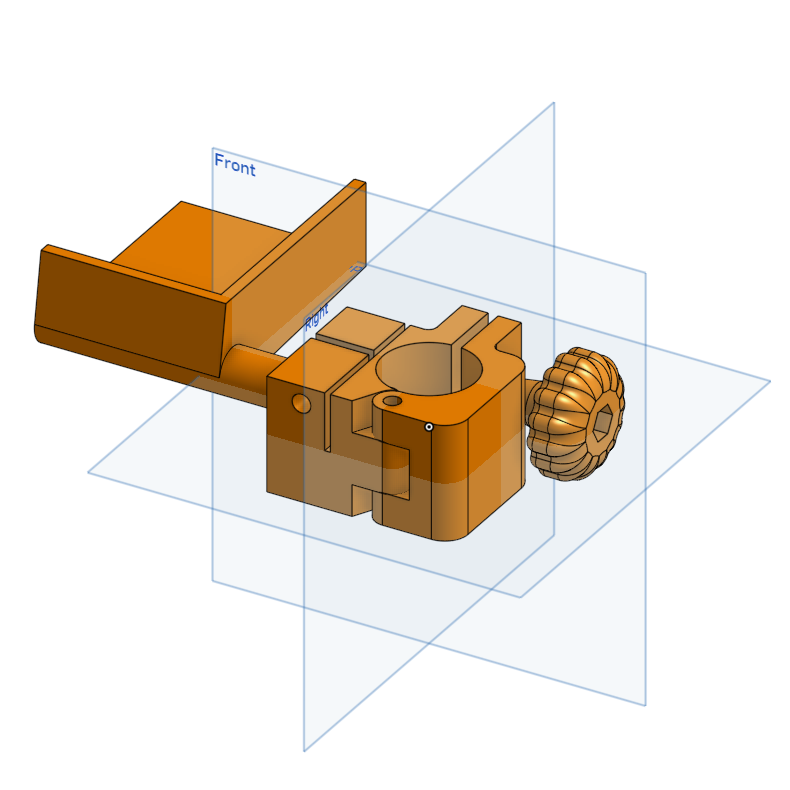
L’altro è un accessorio che mi sono stampanto con la stampante 3d.
E’ un supporto che si aggancia alla palina e che ti permette di appoggiarci il distanziometro aiutandoti a “mirare” il punto che ti serve.

Te lo dico già: non è un oggetto che mi sono inventato in qualche modo. esiste già, è acquistabile e funziona molto bene.

Però mi sono divertito a stamparmi in 3d il mio accessorio e volendo posso farci delle modifiche e personalizzazioni di quasi qualunque tipo.
Il modello è stato creato su una piattaforma online che si chiama OnShape.
E’ un servizio online, che riprende la maniera di modellare e generare oggetti di software parametrici in stile FreeCad (per il mondo openosource) e SolidWorks (per il mondo commerciale e proprietario).
OnShape è un buonissimo servizio e funziona bene!
Se ti interessa un piccolo corso su questo strumento, molto potente e gratuito nella sua versione base, qui trovi una playlist youtube del mio amico Stefano Spagnolo che ha creato un corso su OnShape (e non solo, guarda il suo canale).
Il merito del modello del supporto è suo!
Questo accessorio permette di tenere molto fermo il distanziometro durante la fase di misurazione della distanza inclinata, permettendoti di ridurre al minimo l’incertezza della misura orizzontale calcolata.
Infatti la precisione della distanza orizzontale dipende anche dall’angolo di inclinazione dell’inclinometro interno del distanziometro, che per quanto possa sembrare il contrario (angolo con decimali), non è un dato precisissimo.
conclusione
Anche questo, come altri casi che mi capitano tutti i giorni, mi rende sempre più convinto che non esista “lo strumento” di misura, ma che ogni strumento che adoperiamo abbia dei pro e dei contro e che la soluzione definitiva al rilievo, di qualunque tipo di rilievo di tratti, non è un unico strumento, ma una serie di strumenti e di tecniche che tutte insieme ci permettono di risolvere i vari problemi o criticità che incontriamo in campo, per poter portare a casa il dato più utile possibile, e che più risponde alle richieste dei nostri committenti.
il modello
se pensi che possa esserti utile, eventualmente come base di partenza per una tua personalizzazione, ti linko qui sotto il file stl (il file per la stampa 3d) dei componenti dell’accessorio che ti ho mostrato.
Oltre a stampare i file stl (della manopola tu servono 2 pezzi!), ti serviranno anche delle viti e dei bulloni, niente di particolare!
CIAO!